Noise Simulation & Noise Frame¶
Noise Simulation models how sound propagates from one or more source points, taking into account obstacles, vegetation, and environmental conditions. The outputs are noise exposure maps that are useful for urban planning, environmental impact assessments, and acoustic zoning.
The module provides several simulation methods depending on the required level of detail and computational performance.
Full wave-based simulation — physically detailed modeling of sound propagation.
Simplified geometric frame — faster approximate results for general assessments.
Full Wave-Based Simulation¶
Performs detailed noise modeling using wave-based acoustic calculations. This approach accounts for reflections, diffractions, and absorption by materials.
- objectnat.simulate_noise(source_points, obstacles, source_noise_db=None, geometric_mean_freq_hz=None, **kwargs)[source]¶
Simulates noise propagation from a set of source points considering obstacles, trees, and environmental factors.
- Parameters:
source_points (
geopandas.GeoDataFrame) – A GeoDataFrame with one or more point geometries representing noise sources. Optionally, it can include ‘source_noise_db’ and ‘geometric_mean_freq_hz’ columns for per-point simulation.obstacles (
geopandas.GeoDataFrame) – A GeoDataFrame representing obstacles in the environment. If a column with sound absorption coefficients is present, its name should be provided in the absorb_ratio_column argument. Missing values will be filled with the standart_absorb_ratio.source_noise_db (
float, optional) – Default noise level (dB) to use if not specified per-point. Decibels are logarithmic units used to measure sound intensity. A value of 20 dB represents a barely audible whisper, while 140 dB is comparable to the noise of jet engines.geometric_mean_freq_hz (
float, optional) – Default frequency (Hz) to use if not specified per-point. This parameter influences the sound wave’s propagation and scattering in the presence of trees. Lower frequencies travel longer distances than higher frequencies. It’s recommended to use values between 63 Hz and 8000 Hz; values outside this range will be clamped to the nearest boundary for the sound absorption coefficient calculation.
- Keyword Arguments:
absorb_ratio_column (
str, optional) – The name of the column in the obstacles GeoDataFrame that contains the sound absorption coefficients for each obstacle. Default is None. If not specified, all obstacles will have the standart_absorb_ratio.standart_absorb_ratio (
float, optional) – The default sound absorption coefficient to use for obstacles without specified values in the absorb_ratio_column. Default is 0.05, which is a typical value for concrete walls.trees (
geopandas.GeoDataFrame, optional) – A GeoDataFrame containing trees or dense vegetation along the sound wave’s path. Trees will scatter and absorb sound waves.tree_resolution (
int, optional) – A resolution parameter for simulating tree interactions with sound waves. Recommended values are between 2 and 16, with higher values providing more accurate simulation results.air_temperature (
float, optional) – The air temperature in degrees Celsius. The recommended range is from 0 to 30 degrees Celsius, as temperatures outside this range will be clipped. Temperature affects the sound propagation in the air.target_noise_db (
float, optional) – The target noise level (in dB) for the simulation. Default is 40 dB. Lower values may not be relevant for further analysis, as they are near the threshold of human hearing.db_sim_step (
float, optional) – The step size in decibels for the noise simulation. Default is 1. For more precise analysis, this can be adjusted. If the difference between source_noise_db and target_noise_db is not divisible by the step size, the function will raise an error.reflection_n (
int, optional) – The maximum number of reflections (bounces) to simulate for each sound wave. Recommended values are between 1 and 3. Larger values will result in longer simulation times.dead_area_r (
float, optional) – A debugging parameter that defines the radius of the “dead zone” for reflections. Points within this area will not generate reflections. This is useful to prevent the algorithm from getting stuck in corners or along building walls.use_parallel (
bool, optional) – Whether to use ProcessPool for task distribution or not. Default is True.
- Returns:
- A GeoDataFrame containing the noise simulation results, including noise levels and geometries
of the affected areas. Each point’s simulation results will be merged into a single GeoDataFrame.
- Return type:
gpd.GeoDataFrame
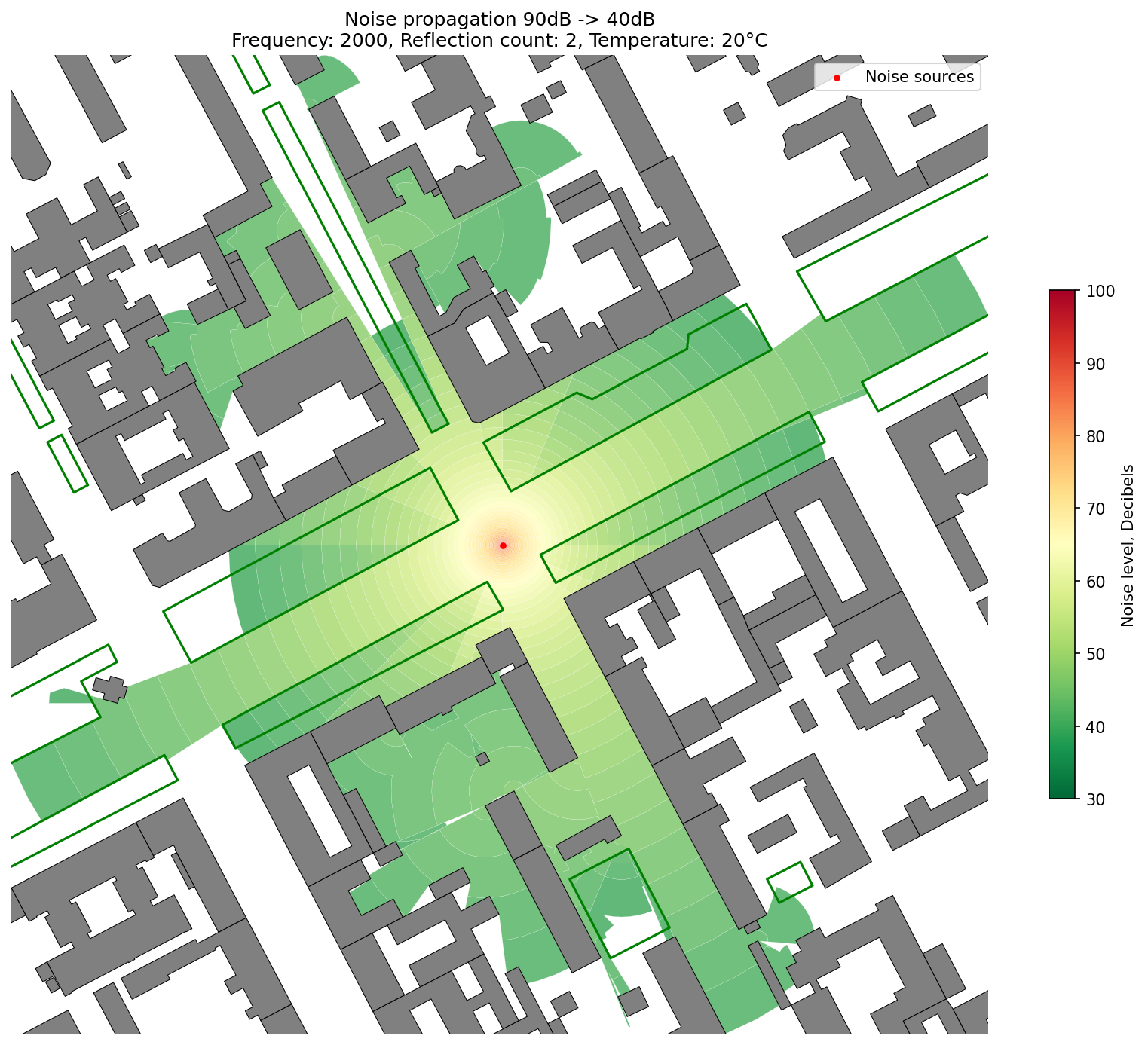
Example of full wave-based simulation for a single noise source.¶
Simplified Noise Frame¶
Generates a simplified noise exposure map using only geometric visibility and sound decay with distance, without running a full wave simulation. Ideal for rapid assessments or large-scale analyses where precision is less critical.
- objectnat.calculate_simplified_noise_frame(noise_sources, obstacles, air_temperature, *, target_noise_db=40, db_sim_step=5, linestring_point_radius=15, polygon_point_radius=5, visibility_parallel=True, visibility_max_workers=None)[source]¶
Calculates a simplified environmental noise frame using static noise source geometries without simulating full sound wave propagation or reflections.
This function provides a fast approximation of noise dispersion from a variety of source geometries, including points (e.g., traffic noise measurement points), lines (e.g., roads or railways), and polygons (e.g., industrial zones or buildings). Instead of simulating detailed wave interactions and reflections, it constructs an envelope of potential noise exposure by buffering the source geometry and applying simplified decay formulas based on sound power, frequency and temperature.
- Parameters:
noise_sources (
geopandas.GeoDataFrame) –A GeoDataFrame containing geometries of noise sources (Point, LineString, or Polygon). Each feature must have the following two columns:
’source_noise_db’: Initial sound level at the source, in decibels (dB).
’geometric_mean_freq_hz’: Characteristic sound frequency (Hz) used to model distance-based attenuation.
Values in ‘source_noise_db’ must not exceed the physical maximum of 194 dB. Missing or NaN values in required fields will raise an error.
obstacles (
geopandas.GeoDataFrame) – A GeoDataFrame representing physical obstructions in the environment (e.g., buildings, walls, terrain). These are used to build visibility masks that affect where sound can propagate. Geometry will be simplified for performance using a default tolerance of 1 unit.air_temperature (
float) – The ambient air temperature in degrees Celsius. This value influences the attenuation model of sound in the atmosphere. Temperatures significantly outside the typical 0–30°C range may lead to inaccurate results.target_noise_db (
float, default40) – The minimum sound level threshold (in dB) to be modeled. Any value below this threshold is considered insignificant and will be excluded from the resulting noise frame. Default is 40 dB.db_sim_step (
float, default5) – The simulation step size (in dB) used to discretize sound levels into spatial layers. Default is 5. Smaller values produce more detailed output but increase computation time.linestring_point_radius (
float, default=15) – The spacing radius (in meters) used when converting LineString geometries into distributed point sources for simulation. Default is 30. Reducing this value improves detail along long lines.polygon_point_radius (
float, default=5) – The point spacing (in meters) for distributing sources within Polygon geometries. Default is 15. Points are sampled across the polygon’s surface and perimeter to represent the full sound-emitting area.visibility_parallel (
bool, optional) – If True, visibility polygons for all distributed sample points are computed in parallel using multiprocessing. Recommended when the number of sample points is large. Default is True.visibility_max_workers (
int | None, optional) – Maximum number of parallel worker processes for visibility computation. None uses the system default.
- Returns:
A GeoDataFrame representing simplified noise distribution areas. The output geometries are polygons where each polygon is associated with the maximum sound level (in dB) present in that area, as derived from overlapping source zones. The resulting data is dissolved by noise level and returned in the original coordinate reference system (CRS) of the input sources.
- Return type:
gpd.GeoDataFrame
Notes
The function does not model reflections or complex diffraction effects. It uses straight-line visibility (line-of-sight) and a layered distance-decay approach for rapid estimation.
Obstacles are used for visibility masking only, not as reflectors or absorbers.
Output resolution and accuracy depend heavily on the geometry type and point distribution settings.
Parallel visibility significantly improves performance for line and polygon sources with many sample points.
Results are useful for quick noise mapping or for generating initial noise envelopes prior to more detailed simulations.
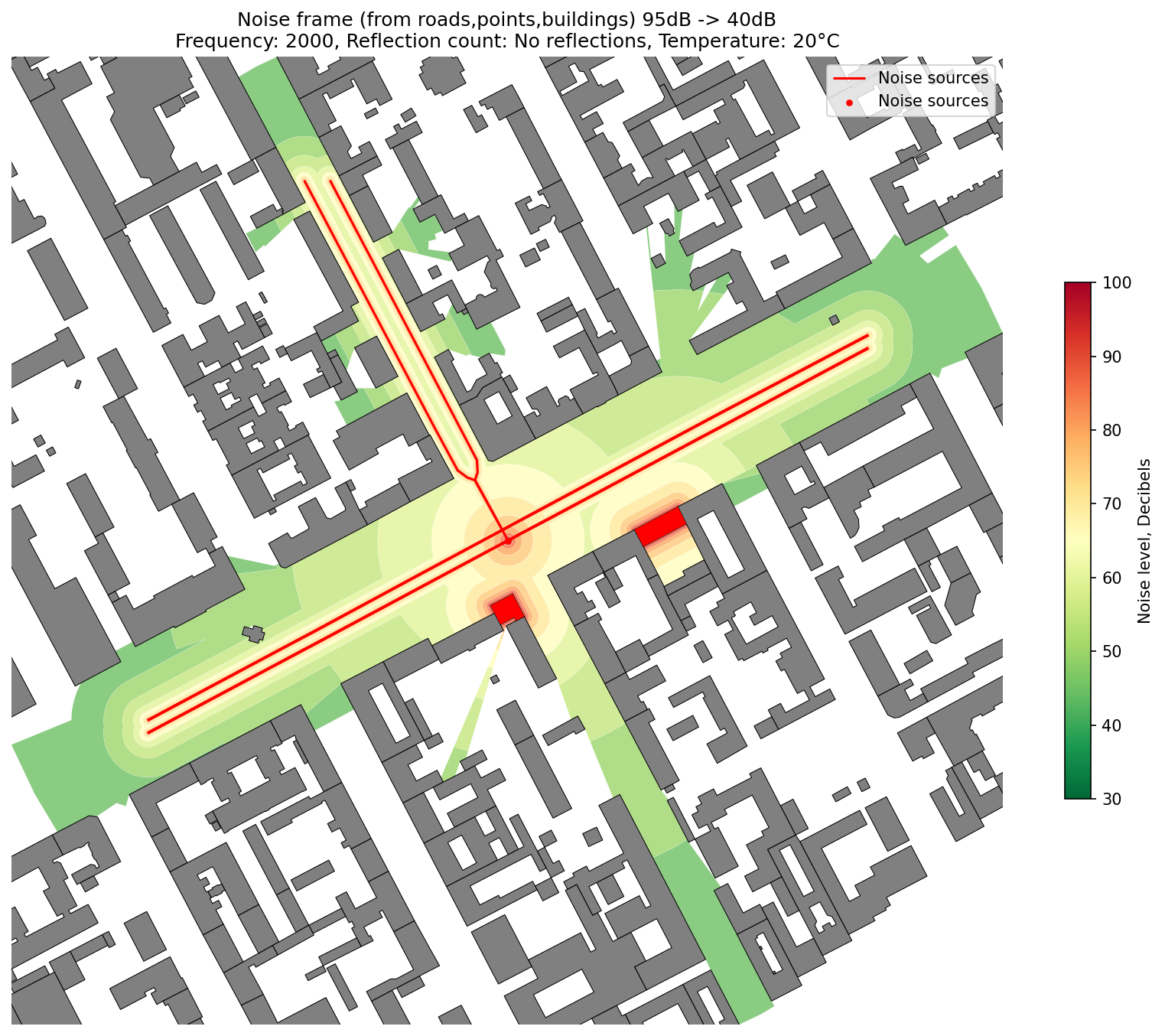
Simplified geometric noise exposure frame — fast and efficient.¶
Additional Resources¶
For comprehensive documentation and advanced configuration options, see the project Wiki: